Case Study:
Medical Microrobot Gripper
High-Precision Medical Microrobot Gripper for Stroke Treatment
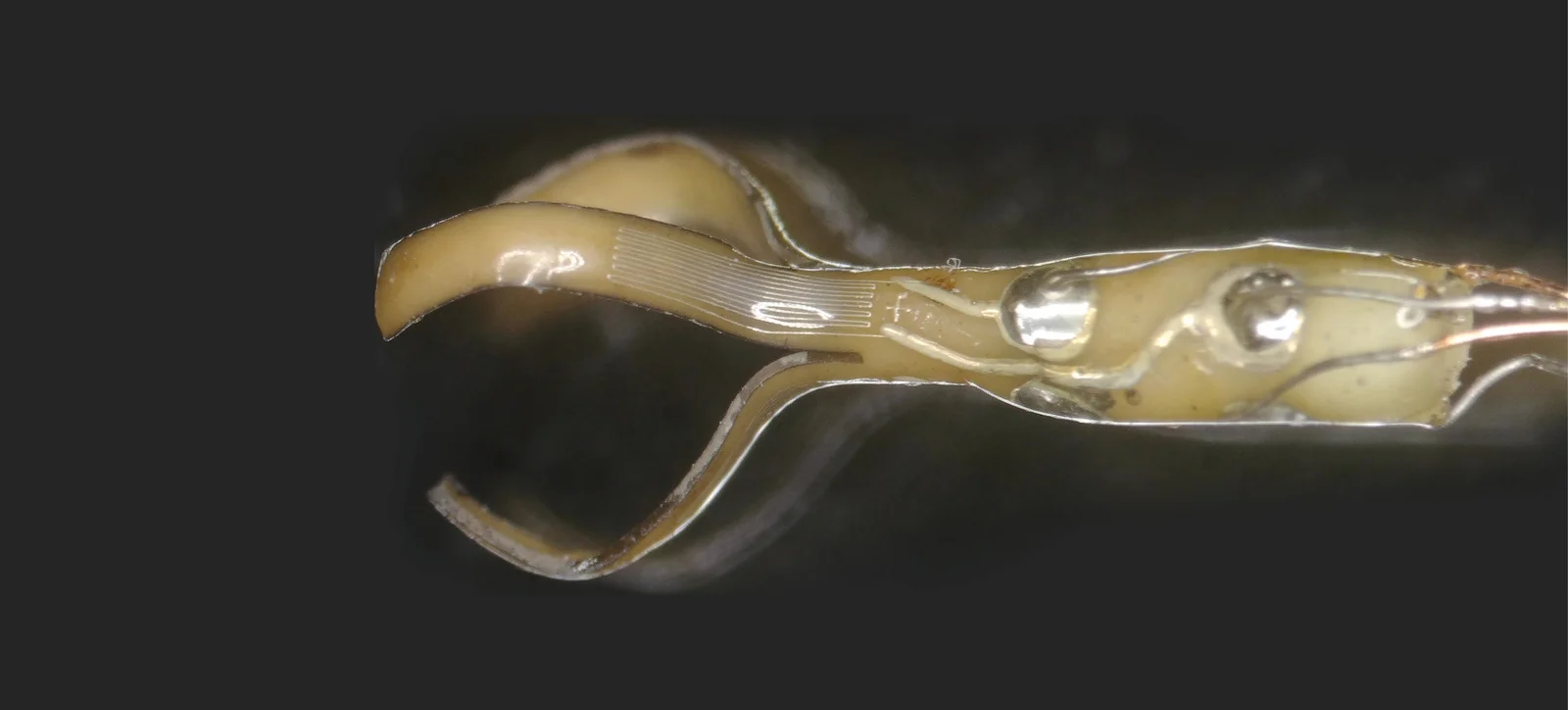
The Multiscale Robotics Lab of ETH Zurich has developed a gripper designed for the deployment of microrobots within blood vessels.
These microrobots are intended for stroke treatment and are controlled via magnetic fields. Given the complexity of this control mechanism, it is crucial to bring the microrobot as close as possible to the affected area in the brain. To achieve this, the microrobot is enclosed within the gripper, which is then guided through a catheter to the targeted region.
Since magnetic control must be executed very quickly in the high blood flow environment, it is crucial to precisely determine the location and timing of the microrobot's release. The imaging technology typically available in hospitals poses a limitation in this process. Therefore, it is essential to have an alternative method to accurately determine the robot's release point.

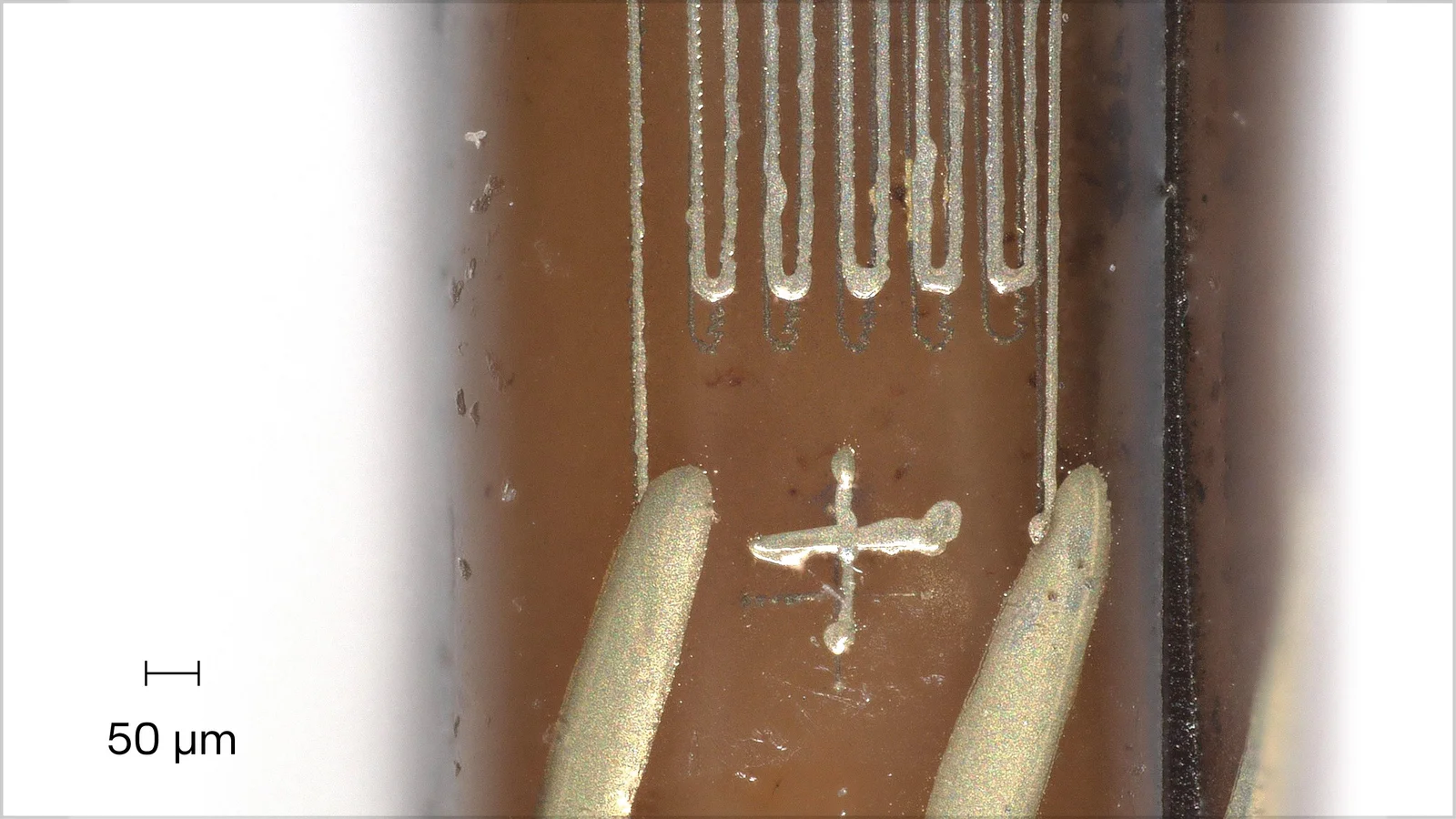
Cicor‘s Printed Electronics address this challenge by integrating printed strain sensors onto the gripper arms. These sensors deliver precise feedback on the exact moment the microrobot is released, ensuring controlled and accurate deployment in complex medical applications.
Printed Electronics at Cicor
Discover the future of miniaturisation with Cicor's cutting-edge Aerosol Jet Printing technology, enabling smart, sustainable, and high-precision solutions for medical, aerospace, and industrial applications.
