Case Study:
Greifer für medizinischen Mikroroboter
Hochpräziser medizinischer Mikroroboter-Greifer für die Schlaganfallbehandlung
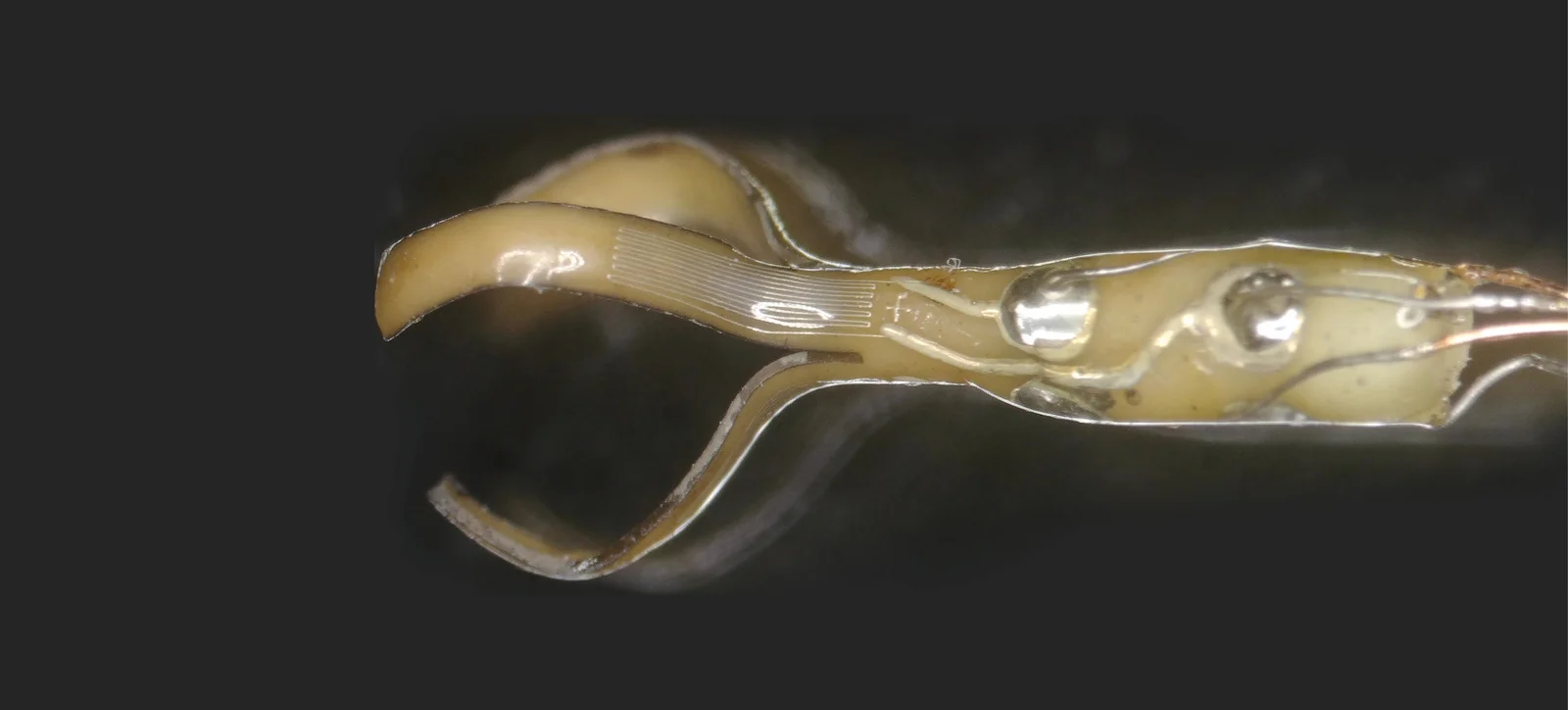
Das Multiscale Robotics Lab der ETH Zürich hat einen Greifer entwickelt, der für den Einsatz von Mikrorobotern in Blutgefässen konzipiert ist.
Diese Mikroroboter werden zur Behandlung von Schlaganfällen eingesetzt und durch Magnetfelder gesteuert. Aufgrund der Komplexität dieser Steuerung ist es entscheidend, den Mikroroboter so nah wie möglich an die betroffene Gehirnregion zu bringen. Dazu wird der Roboter im Greifer eingeschlossen und über einen Katheter präzise an die Zielstelle geführt.
Da die magnetische Steuerung in der schnellen Blutströmung äusserst präzise erfolgen muss, ist es wichtig, den Ort und Zeitpunkt der Freisetzung exakt zu bestimmen. Die in Krankenhäusern üblicherweise verfügbare Bildgebung ist hierbei ein Engpass, weshalb eine alternative Methode erforderlich ist, um den Freisetzungszeitpunkt genau zu bestimmen.

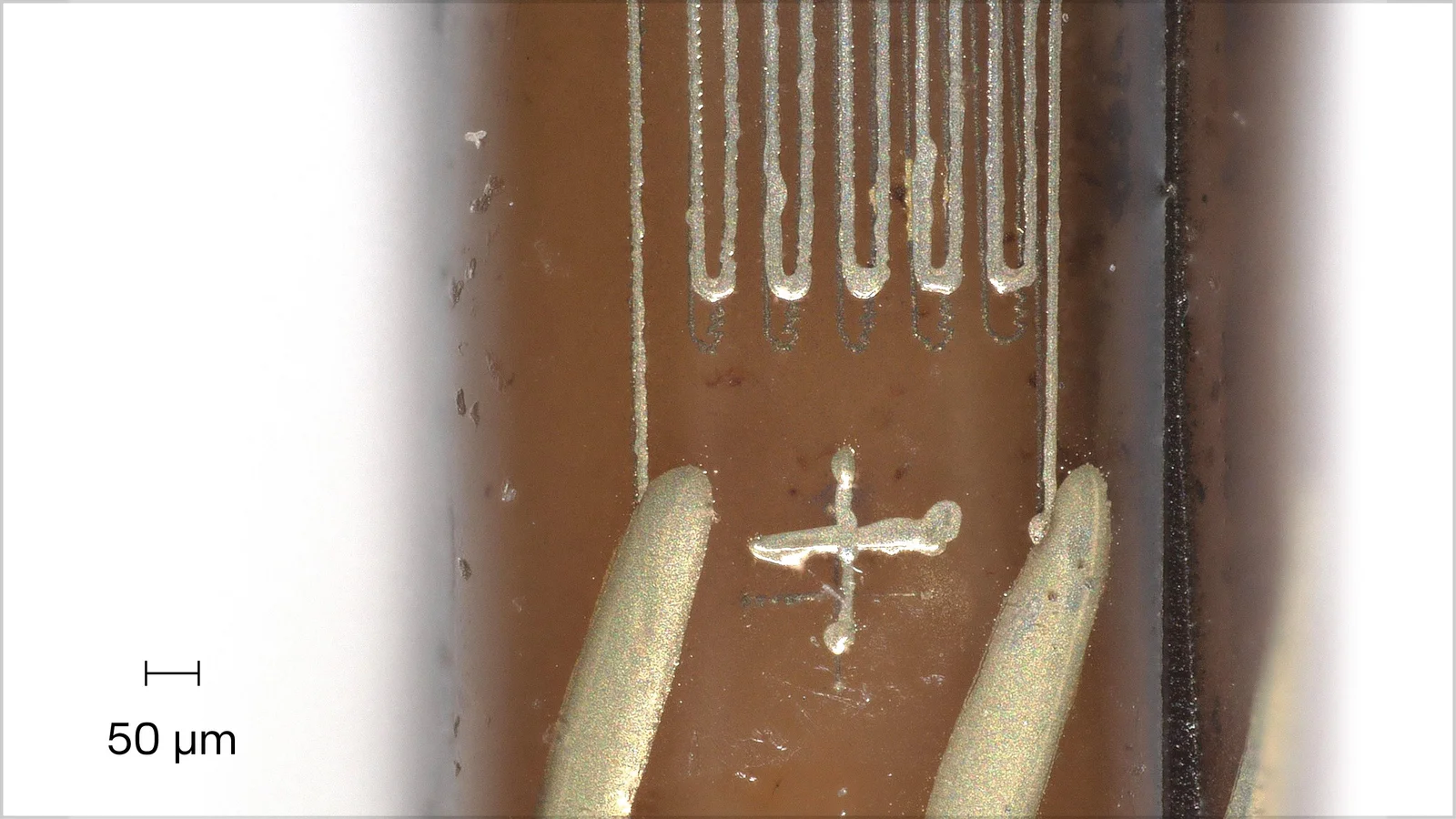
Gedruckte Elektronik von Cicor löst diese Herausforderung durch die Integration von Dehnungssensoren auf den Greiferarmen. Diese Sensoren liefern präzises Feedback über den exakten Zeitpunkt der Freisetzung des Mikroroboters und ermöglichen so eine kontrollierte und präzise Platzierung in anspruchsvollen medizinischen Anwendungen.
Printed Electronics at Cicor
Discover the future of miniaturisation with Cicor's cutting-edge Aerosol Jet Printing technology, enabling smart, sustainable, and high-precision solutions for medical, aerospace, and industrial applications.
